목차
복소수의 도입
허수의 실재
사람들은 의 해를 비롯해, 실수로 나타낼 수 없는 이차방정식의 근을 나타내기 위해 허수를 도입했다. 영어로는 imaginary number인 허수는 실재하지 않는다는 의미를 가지고 있다. 제곱을 하여 -1이 되는 수가 어디 있겠냐마는, 나는 허수라는 이름이 굉장히 naive하게 지어졌다고 생각한다. '수'라는 개념 자체가 애초에 추상적이라는 사실을 떠올려보자. 거듭제곱해서 -1이 되는 만큼이나 -1 자신, 그리고 0이나 무리수도 충분히 추상적인 개념이다. 파스칼을 비롯한 여러 수학자들도 음수를 받아들이는데 어려움을 겪었다고 한다. 허수까지 갈 것 없이, 실수 체계도 우리가 일상생활에서 사용하는 숫자—개수 세기—와 충분히 괴리가 크다.
의 해도 음수를 고안하기 전까지는 해가 없다고 취급을 하였다. 지금의 입장에서는 부자연스럽지만, 저 방정식의 해를 허수라고 불러도 문제가 없을 것이다.
역사적으로, 수학자들은 수 체계를 확장할 때 기하적인 접근법을 사용했다. 음수와 무리수 등을 포함한 실수 체계도 수직선과 수를 일대일로 대응시켜 만들어진 산물이라고 볼 수 있다. 이미 복소수가 잘 정의된 지금의 시점에서 본다면, 복소수는 수평면을 수로 나타내기 위한 확장이라고 볼 수 있다. 이 관점으로는 해밀턴의 사원수까지도 수의 자연스러운 형태로 받아들일 수 있다. 여하튼, 허수는 충분히 '자연스러운' 수 체계의 확장이다. 실제로 양자 역학의 영역으로 들어간다면, 자연에서도 본질적으로 허수가 실재한다고 생각할 수 있다.
각설하고, 제곱해서 -1이 되는 수는 사실 두 개가 있다. 그 중 임의로 하나를 , 다른 하나를 로 잡은 것이다. (왜 두 개가 있느냐 하면, 제곱을 하면 -의 부호가 +가 되기 때문이다. 생각해보면 이 또한 음수의 특별한 성질 중 하나이며, 수학자들이 왜 처음에 음수를 받아들이기 힘들어했는지를 엿볼 수 있는 대목이다.) 따라서 우리는 **허수의 '방향성'**을 생각할 수 있다. 나아가, 허수와 실수를 결합한 형태인 복소수는 수평면 상의 한 점을 나타내는데 사용할 수 있다. 여기서 복소수는 실수 와 허수 의 실수 배의 합인 의 꼴로 나타낼 수 있다.
이차방정식의 해
위에서 간단히 살펴본 뿐만이 아니라, 임의의 복소계수 이차방정식의 해는 복소수로 나타낼 수 있다. (복소계수란 각 항의 계수가 복소수라는 의미이다. 또한, 실계수는 각 항의 계수가 실수라는 것을 말한다.) 즉, 복소수를 도입하더라도 그 해를 나타내는데 새로운 수 체계가 필요하지 않다. 일단은 실계수 이차방정식
을 보자. 일반적으로, 해 는
로 나타낼 수 있다. 여기서 가 음수라면 를 나타내기 위해 복소수의 도입이 불가피하다는 사실을 알 수 있다. 실계수 이차방정식의 해는 근호 안의 부분이 양수이나 음수이냐에 따라 실수가 될 수도, 복소수가 될 수도 있다. 따라서 이 부분은 해의 형태를 판별하는데에 있어서 중요한 의미를 가지며, 이를 판별식이라고 한다. 보통 라는 기호로 나타낸다.
예를 들어 방정식 의 해는,
으로 방정식에 들어간 모든 계수가 실수임에도 불구하고 그 해는 복소수라는 것을 알 수 있다.
복소평면
데카르트 좌표계와 극좌표계
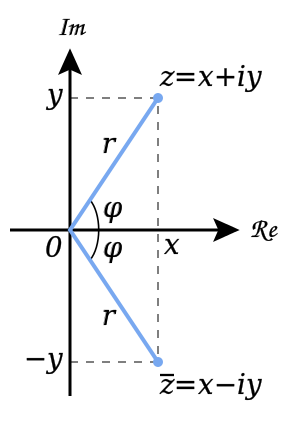
위 그림에서 평면의 가로축은 실수(real의 앞 두 글자를 딴 ), 세로축은 허수(imaginary의 앞 글자를 딴 )를 나타낸다. 이렇게 만든 평면과 복소수를 대응시켜 나타낸 것을 복소평면(comlex plane)이라고 한다. 여기서 복소수의 절댓값(absolute value)과 편각(argument)을 도입하면 오일러(Euler)의 공식을 이해할 수 있다. 위 그림에서 과 가 각각 절댓값과 편각에 해당한다. 실수축의 한 지점과 허수축의 한 지점을 정하면 복소수가 하나로 특정할 수 있듯이, 절댓값과 편각으로 복소수를 특정할 수도 있다. 그렇다면, 이 두 값으로 복소수를 어떻게 표기할 수 있을까? 바로 극좌표를 통해 나타낼 수 있다.
어떤 공간에서 한 점을 나타내는 방법은 한 가지가 아니며, 이렇게 한 점을 나타낼 수 있는 체계를 좌표계라고 한다. 예컨데, 어떤 직교좌표계, 혹은 데카르트 좌표계(Cartesian coordinate system)에서 (1, 3) 위치의 점을 찍었다고 하자. 2차원이기에 위치를 특정하기 위해서는 두 개의 정보가 필요하다. 그리고 이 둘은 독립적이어야한다. 하지만 이뿐이다! (1, 3)의 지점을 나타내기 위해, 좌표의 값과 좌표의 값이 필요한 데카르트 좌표계가 필수적인 것은 아니다. 원점과의 거리와 가로축과의 각도가 주어저도 동일한 지점을 찍을 수 있을 것이다. 이렇게 점을 나타내는 좌표계를 극좌표계(polar coordinate system)라고 한다.
(1, 3)과 원점 (0, 0)까지의 거리는 피타고라스의 정리에 의해 이며, 가로축과 (1, 3)이 이루는 각도는 이다. 따라서, 데카르트 좌표계에서 (1, 3)에 해당했던 지점은 극좌표계에서는 으로 나타낼 수 있다. 일반적으로 어떤 점이 데카르트 좌표계에서는 로, 극좌표계에서는 으로 나타내어질 때, 이 둘 사이의 변환식은 다음과 같다.
오일러의 공식
복소평면에서 어떤 점을 복소수로 나타낼 때, 단순히 절댓값과 편각의 순서쌍으로도 충분히 복소수를 나타낼 수 있다. 하지만, 이 둘의 연산으로 복소수를 '계산'할 수 있는데, 그 돌파구가 바로 오일러의 공식이다. 오일러의 공식을 유도하는데는 여러 가지 방법이 있는데, 여기서는 테일러(Taylor) 전개를 사용한 방법을 보인다. 이 외에도 Euler (오일러) 공식의 세 가지 느슨한 증명에 세 가지 다른 증명법이 소개되어 있다.
테일러 전개에 따르면,
을 알 수 있다. 여기서 는 와 의 합으로 나타낼 수 있음을 확인할 수 있다. 즉, 아래와 같은 공식이 성립한다.
여기서 에 를 대입한 이 오일러의 공식이다.
i의 i승과 복소지수의 다가성
여기까지의 내용을 따라왔다면 아래의 등식을 이해할 수 있을 것이다.
이 때, 이며, 이다. 이런 형태로 복소수를 나타내는 방식을 극형식이라고 부른다. 이제 우리는 어떤 복소수이든 의 꼴로 나타낼 수 있게 되었다. 변환식에 를 넣으면 극형식으로 가 된다. 기하학적으로 보자면 원점과의 거리가 1, 가로축과 이루는 각이 라디안으로 이라는 관찰과 부합한다. 이제 의 승, 즉 를 변환식에 넣어보자.
놀랍게도 허수의 허수승인 의 값은 다름아닌 실수, 0.2078...가 나왔다. 을 떠올릴 수 있는 대목이다.
여기서 끝이 아니다! 복소 로그 함수와 복소 지수, 그리고 다가성 (multivaluedness)를 보면 알 수 있겠지만, 복소지수에는 여러 값을 배정할 수 있다. 그 말인즉슨, 0.2078...이 의 유일한 정답이 아니라는 것이다. 이는 복소지수의 다가성(multivaluedness)에 기인한 성질인데, 위의 내용에서 의 편각에 가 아니라 이나 를 넣어도 문제될 것이 없다. 정수 에 대해서 의 꼴이라면 항상 과 같은 방향을 가리키고 있기 때문이다. 일반적으로 는 아래와 같이 계산할 수 있다.
이번 포스트에서는 의 승에 대한 해답을 찾는 것에 포커스를 맞추어 복소수에 대해서 알아보았다. 이와 관련된 내용에 대해 더 알고 싶다면, [https://en.wikipedia.org/wiki/Complex_logarithm](Complex logarithm)를 참고해보자.